Damped Oscillations
In real oscillating systems, mechanical energy is lost from the system due to frictional or any other dissipative forces leading to decrease in amplitude and finally oscillations stop.
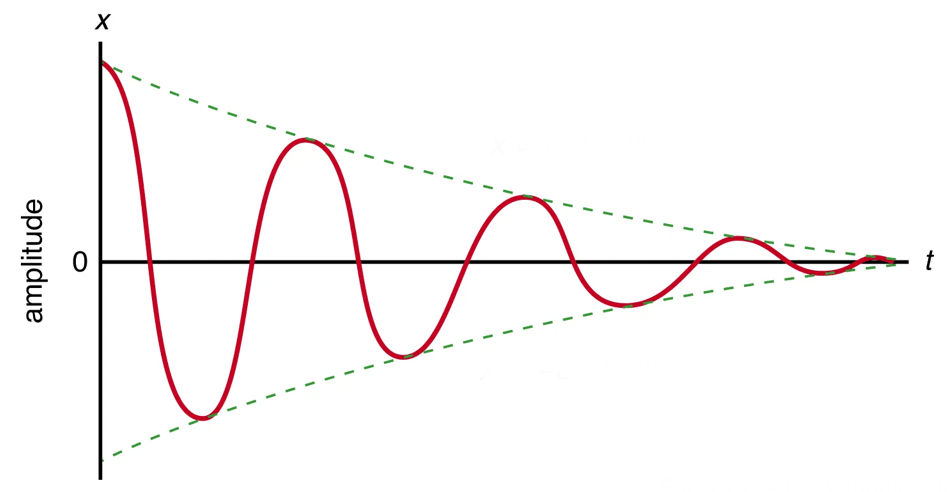
If the amplitude of the oscillations of a system decreases with time then it is called damped oscillations. If the oscillations of a system persist without any change in its amplitude then it is called undamped oscillations.
Damped harmonic motion is defined as decay or decrease of amplitude of motion with respect to time in presence of air or other medium. The oscillator which performs such type of motion is known damped harmonic oscillator.
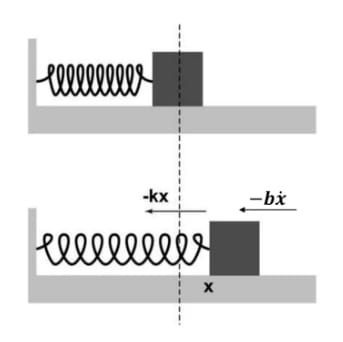
Consider a body executing damped harmonic oscillations. Let x be the displacement of the body from its mean position at an instant of time t.
Let be its instantaneous velocity.
The vibrating body is constantly acted upon by restoring force given by,
where k - force constant and x - displacement
The damping force always acts in a opposite directions to that of motion of oscillatory body and velocity dependent.
where r - damping constant
The total force acting on the body is:-
From Newton's second law,
equation - 1 becomes:-
or
or
let
where is natural frequency of oscillating body.
Hence, equation - 2 becomes:-
The general solution of above equation is given by:-
On differentiating above equation twice we get,
Putting values of and and x in equation - 3
As,
Using quadratic formula,
So,
Hence, the general solution of equation - 3 is given by,
where A and B are constants.
Different Damping Conditions
-
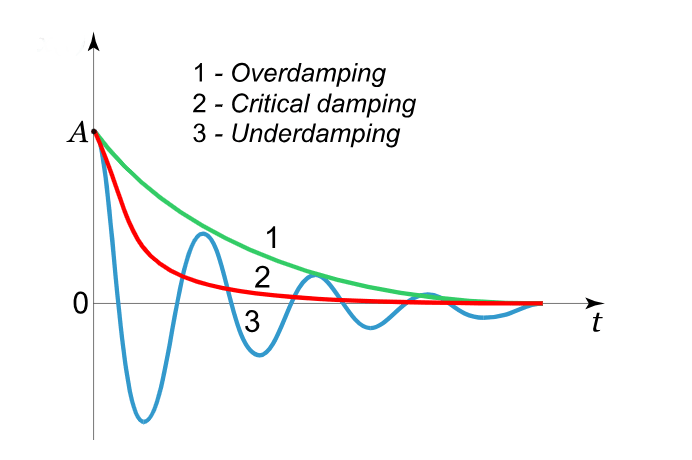
Case 1: Over damping
For Over damping, indicating a high level of damping. Consequently, is positive. Under this condition, the system returns to its equilibrium position slowly without oscillating. Overdamped systems exhibit no oscillations, but the return to equilibrium can be slow due to high friction or damping. Such a motion is called dead-beat or aperiodic.
-
Case 2: Critical damping
For Critical damping, , signifying a damping level that just prevents oscillation. The solution to the differential equation takes the form , where and are constants determined by initial conditions. Critical damping ensures the system returns to its mean position without oscillating and achieves this return as quickly as possible without overshooting or exceeding the equilibrium position.
-
Case 3: Under damping
For Under damping, , indicating less damping compared to the critical damping case. In this situation, is an imaginary number with a negative real part. The solution to the differential equation takes the form where represents the frequency of oscillation, is the initial displacement, and is the phase angle and . Underdamped systems continue to oscillate with decreasing amplitude until eventually returning to their initial state. This motion is oscillatory.
Power Dissipation
Whenever the system is set into oscillations, its motion is opposed by frictional (damping) forces due to air resistance. The work done against these forces is dissipated out in the form of heat. So the mechanical energy of the system continuously decreases with time and amplitude of oscillation gradually decays to zero.
We consider the time average condition we assume that the amplitude remains nearly constant in one oscillation
We know,
Average K.E. of harmonic oscillator in ideal case =
However in practical case (damped oscillation) , Average K.E. is =
Similarly, Average P.E. of harmonic oscillator in ideal case =
and in practical case (damped oscillation) =
On adding equation 1 and 2 we get,
Total Energy =
We know
equation - 3 becomes,
Since, The Rate of dissipation of energy is called power dissipation i.e. =
We know, , Here is relaxation time and
Above equation becomes,
Quality Factor
The quality factor is defined as times the ratio of the energy stored in the system to the energy lost per period.
where is power dissipated and is periodic time. We know that where is relaxation time. So,
where
Higher the value of , higher would be the value of relaxation time . (i.e. as is high, damping is low.)
Relaxation Time
Relaxation time is the time after which the energy reduces to of its initial value . If is the relaxation time, then at ,
We know,
On Comparing,
we get relaxation time = where is damping coefficient.
So, energy can be expressed as