RC Phase Shift Oscillator
Analysis of RC Circuit
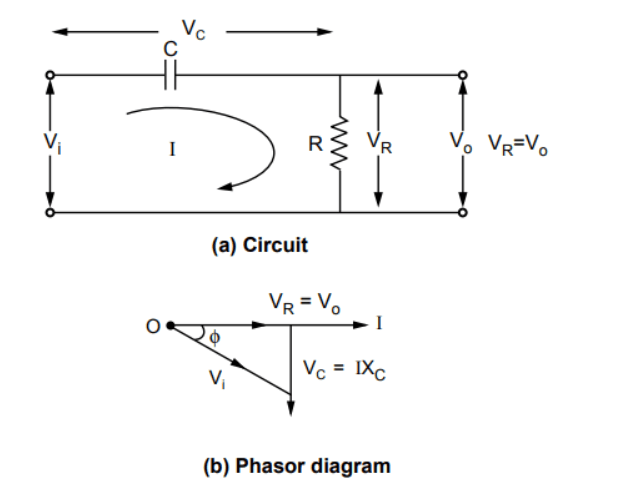
The basic RC network is shown in Fig. (a), with the output taken across the resistor .
-
The capacitive reactance is given by: where is the frequency of the input.
-
The total impedance of the circuit is:
-
The current flowing in the circuit is:
Therefore:
The equation (ii) shows that the current leads the input voltage by angle .
-
The output voltage is the drop across :
-
The output voltage is in phase with the current, hence it leads the input voltage by angle .
-
Thus, the RC circuit introduces a phase shift between the input and output, which depends on , , and frequency .
RC Feedback Network for Phase Shift
-
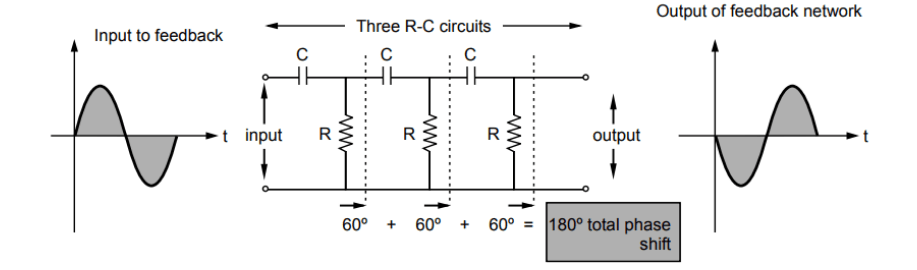
In an RC phase shift oscillator, the amplifier introduces a phase shift of .
-
Thus, the feedback network must introduce a phase shift of to satisfy the Barkhausen criterion.
-
The RC feedback network consists of three RC sections, each contributing phase shift.
-
Hence, the feedback network consists of three RC sections, as shown in the figure.
-
In all three sections, resistance and capacitance values are the same, ensuring each section produces precisely phase shift at a particular frequency. This frequency is the operating frequency of the oscillator.
Transistorized RC Phase Shift Oscillator
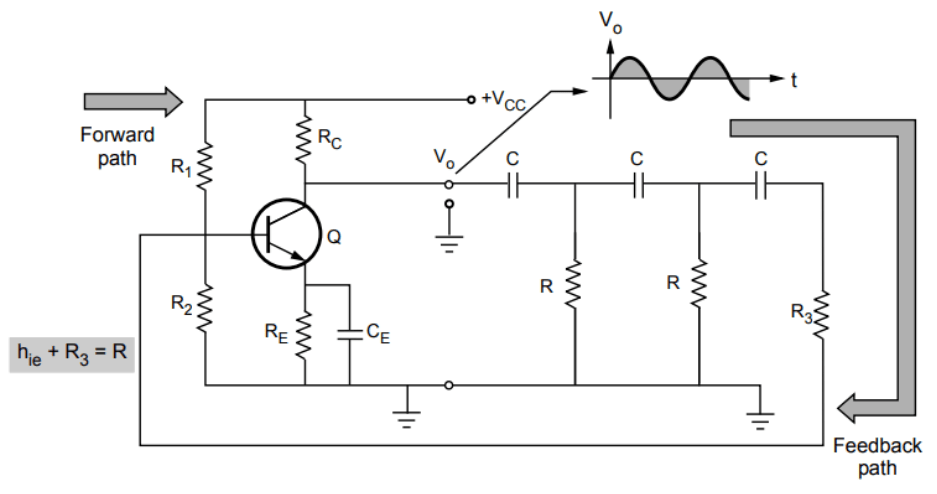
The figure shows an RC phase shift oscillator using a BJT amplifier stage in a common emitter configuration.
-
The output of the common emitter amplifier is connected as input to the RC phase-shifting network.
-
The output of the RC phase-shifting network is connected as input to the amplifier.
-
The common emitter amplifier introduces a phase shift of between its input and output.
-
The RC phase-shifting network contributes another phase shift, making the total phase shift around the loop .
Neglecting and , the input impedance of the amplifier stage is :
-
To have all three resistance values in the RC sections equal, the resistance in the last section is selected as such that:
-
If and are not neglected:
-
When the gain of the amplifier stage and feedback factor are adjusted to give , the circuit will work as an oscillator, satisfying both the Barkhausen conditions.
Sure, let's go through the derivation of the frequency of oscillations for the RC phase shift oscillator in detail:
Derivation of Frequency of Oscillations
-
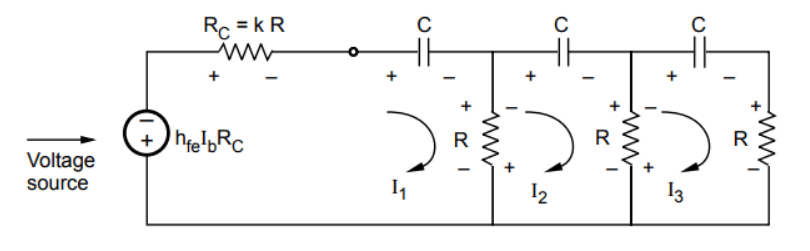
Equivalent Circuit:
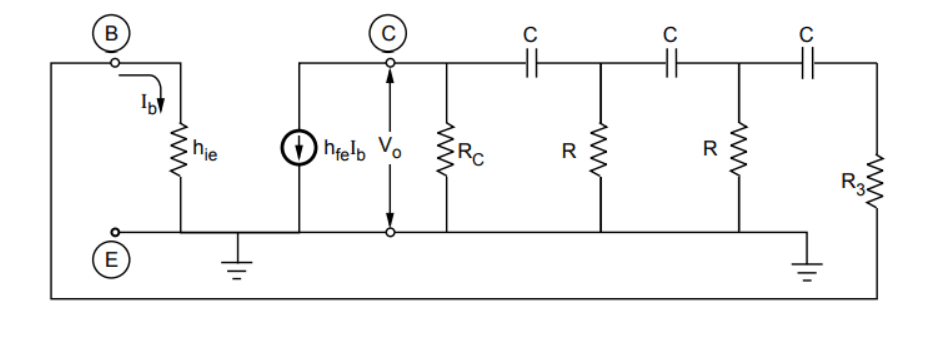
Replace the transistor with its approximate -parameter model as shown in the figure.
-
The total resistance in the circuit is given by: where is the input resistance of the transistor, and is the resistance in the RC network.
-
The resistance in the RC network is related to by a factor : Thus:
-
The modified equivalent circuit is shown below.
-
-
Applying KVL:
Apply Kirchhoff's Voltage Law (KVL) to the three loops in the circuit:
-
Loop 1 (across , , and ):
Substituting :
-
Loop 2 (across , , and ):
-
Loop 3 (across , , and ):
-
-
Solving Using Cramer's Rule:
Construct the determinant from the above equations:
Solving this determinant:
Find to solve for :
Therefore:
The transistor current gain and are related by:
Therefore:
-
Frequency Calculation:
From equations (xii) and (xi),
Using and
Separating the real and imaginary parts we get,
Dividing numerator and denominator by and replacing
where .
To satisfy the Barkhausen criterion (), the imaginary part must be zero:
Thus, the frequency of oscillations is:
Minimum Value of :
Substituting in equation (xiv),
For :
To find the minimum value of , differentiate with respect to :
Substituting :
Thus, the transistor must have for the circuit to oscillate.
Advantages of RC Phase Shift Oscillator
- The circuit is simple to design.
- Can produce output over the audio frequency range.
- Produces a sinusoidal output waveform.
- It is a fixed-frequency oscillator.
Disadvantages of RC Phase Shift Oscillator
- To vary the frequency, the values of the resistors (R) and capacitors (C) in all three sections need to be adjusted simultaneously, which is practically difficult. Hence, the frequency cannot be easily varied.
- Frequency stability is poor due to changes in component values caused by factors such as temperature variations and aging.